
Reconstructing the Lost Planetarium of the Antikythera Mechanism
To do so, we have to keep in mind what information was available at the time. So let’s create a proverbial ancient astronomer, Neokles. Noekles is living in first century BC in contemporary Greece and has been hired to design a planetarium to show the motion of the planets. He’s been studying the night sky for several years and has discovered the following:
The planets and sun all seem to travel along the same arc in the sky, which is fixed relative to the stars. Neokles has discovered the ecliptic. And his interpretation is correct: we are on a spinning sphere and these other celestial objects are all moving is very close to a single plane, and when we look at that plane edge on everything appears in line.
The planets move relative to the stars and the sun.
Some planets (Mercury and Venus) just oscillate back and forth, going from one side of the sun to the other, but never are opposite the sun.
Other planets (Mars, Jupiter, and Saturn) are all moving at different rates in the same direction, but occasionally slow and reverse for a short period (retrograde motion).
Now what sort of clockwork could Neokles used to replicate this motion?

Each one appears to have a sort of linear trend combined with an oscillation, which is very much in line with the epicycle theory of planets existing at the time. Now there are a few ways we could replicate that mechanically, but given that the lunar anomaly correction already found in the Antikythera Mechanism does exactly this it seems likely that it would be used here. Now there are a lot of variables in this design that change its behavior. We have the tooth counts of the 4 gears, the eccentric offset of the gear 2, the pin distance from center, and two variables that would be determined during setup: how gear 1 is oriented when mated to gear 2, and how gear 3 is oriented when mated to gear 4.
Trigonometry is just coming around to existence for Neokles, but he can brute force this analysis with trial and error. Since we don’t know exactly what data he uses or what dimensions he would try, our best shot is to use modern data analysis to get as close to truth as possible.
Geometric Analysis of a Geared Pin-Slot Train
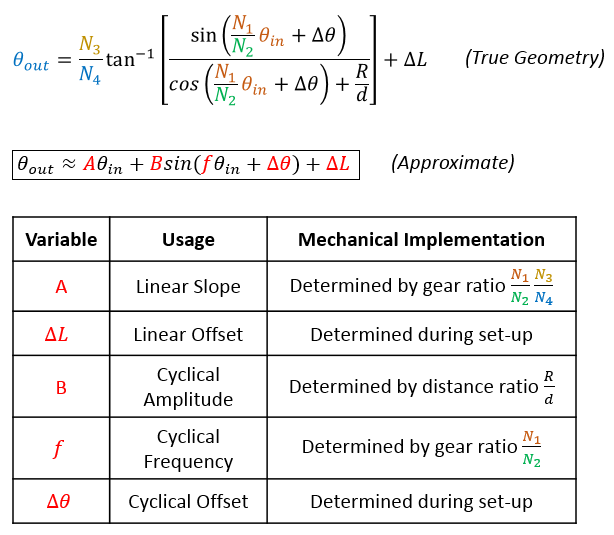
When we look at the specific type of gear train shown in the animation and study the motion, we are able to construct a general equation of motion and see very quickly that the true motion involves nested trig and inverse trig functions. This presents an issue as it well never produce an output angle greater than 1 revolution, in effect it loses count of the rotations. We can use a reasonable approximation of a linear trend with sinusoidal variation. While it isn’t exactly the same, we wouldn’t be able to exactly match the true planetary motion regardless so we can save ourselves much trouble in this regard. For each planet we must determine the variables for which the function most closely matches the planetary motion, there are plenty of ways to do this but I chose the following:
Find linear fit (A & B solved). This is dependent on the time series being substaintially longer than the period of oscillation.
De-trend data with linear fit
Fourier transform and identify prime frequency (f solved). Fun fact: look at the other peaks too. Other than the harmonics at half, quarter, and so on of the prime frequency, you’ll see the true orbital period of the earth for interior planets and the true orbital period of the planet in question for the superior planets. Hints of heliocentrism if our friend Neokles is paying attention…
Use a least-squares minimization algorithm to solve for the shifts (ΔL & Δθ)
This gives us the following results for the 5 planets (data in black, modelled fit in red)

Now we can start designing hardware!
The first thing to notice is that the linear slope of both of the inferior planets is the same number: 0.0172 rad/day. This exactly matches the movement of the sun (2π radians in 365 days). Also notice that in the Antikythera Mechanism the entire planetarium is sitting on the large B1 gear rotating once per year or ….0.0172 rad/day. Rather convenient if you ask me, and no accident! That means that rather than sidereal (inertial) angle, we care about synodic angle (angle away from the mean sun location). This means subtracting out the mean motion of the sun for all planets, zeroing out that component for Mercury and Venus.
Let’s look at an inferior planet and a superior planet so we can see how each work
Inferior Planet (Mercury)
Mercury Gearing
The period of the Mercury oscillation is 115.858 days. From an input of a year (365.24 days) we want a target gear ratio of 0.317212. Using a gear ratio finder, our best single stage match is 13:41 with 0.04% error and our best two stage match is 11:86+31:25 with 0.0008% error. We’ll run with the single stage to keep things simple. We’ll use our cyclic amplitude of 0.470 rad to derive an R/d = 2.275 (1/atan(0.470)) and that’s it! Here’s the Mercury mechanism, showing the average motion matching earth rotation and an oscillation of the correct period and amplitude.
Superior Planet (Jupiter)

Jupiter Gearing
The period of the Jupiter oscillation is 398.801 days. From an input of a year (365.24 days) we want a target gear ratio of 1.091887. Using a gear ratio finder, our best single stage match is 87:95 with 0.01% error and our best two stage match is 33:34+18:16 with 0.002% error. We’ll run with the single stage to keep things simple here too. For the required oscillation magnitude of .223 radians we can use the R/d curve to look up a required R/d of 4.53. We use an equal